Distance between two points

Midpoint between two points
Slope between two points 
Average rate of change of a function
Inverse functions

Transformations of graph of f(x)
f(x − h) + k translates h units ”to the right”,
and k units vertically
−f(x) reflects across x−axis; f(−x) across y−
cf(x) dilates by factor of c vertically
f(cx) dilates by factor of  horizontally
horizontally
Polynomials
General Form 
Factored Form 
Roots 
Rational Functions
Definition  where f, g are polynomials with
no common factors
where f, g are polynomials with
no common factors
Domain all real numbers except where g(x) = 0
x- intercepts at zeros of f
vertical asymptotes at zeros of g
Exponents and Logarithms
Exponential Function 
Definition of Logarithm  is equivalent to by
= x
is equivalent to by
= x
Properties of Logs
Trigonometric Functions
Of acute angles: 
Of any angle:  ( circle radius r)
( circle radius r)
Radians and Degrees 180° =π (radians)
Linear equations
General Form: Ax + By =C
Slope-intercept form y = mx + b
Point-slope form 
Double-intercept form 
Quadratic equations
|
Forms: |
General |
 |
|
|
Vertex |
 |
|
|
Factored |
 |
|
Vertex |
General |
 |
|
|
Vertex |
 |
|
|
Factored |
 |
|
Roots |
General |
 |
|
|
Vertex |
 |
|
|
Factored |
 |
Translations, Reflections, Dilations y = Asin(B(x −
C)) + D, y = Acos(B(x − C)) + D
Horizontal Translation (phase shift) C units
Vertical Translation (vertical shift) D units
Horizontal Dilation By a factor of  (period
becomes
(period
becomes  )
)
Vertical Dilation (amplitude) By a factor of A
Reflections −f(x) reflect across y−axis; f(−x) reflect across x−axis
Trig Identities
Definitions

Pythagorean 
Opposite Angle 
Periodicity 
Complements 
Reduction 
Addition

Double-Angle

Half-Angle s
Product-to- Sum
Sum-to-Product

Inverse Trig Functions
Domain restrictions: sin restricts to  ,
cos restricts to [0,π ], tan restricts to
,
cos restricts to [0,π ], tan restricts to
 for all θ
for all θ
 only for
only for 
 only for
only for 
 only for
only for
Vectors
Position(radius) Given  and
and

Unit Components If  =< x, y >, then
=< x, y >, then

Magnitude (length) If =< x, y >, then
 Unit vector
Unit vector

Scalar Multiplication If =< x, y >, then k
=< kx, ky >
Addition If  =< a, b > and
=< c, d > then +
=< a + c, b + d >
=< a, b > and
=< c, d > then +
=< a + c, b + d >
Dot Product If =< a, b > and
=< c, d > then ·
= ac + bd
Angle between and

Polar Coordinates
Trigonometric (polar) form of Complex Numbers
z = r(cosθ + i sinθ ) is the trigonometric form of the complex
number a + bi, where
a = r cosθ , b = r sinθ and 
zn = rn(cos nθ + i sin nθ ) with z as above
Matrices
Matrix Multiplication If  and
and
 , then
, then 
Identity Matrix  . For any 2 × n matrix A,
. For any 2 × n matrix A,

Inverse Matrices  and
and

Matrix equations If AX = B, then 
Determinants 
Polynomial Functions and Equations
Division Algorithm
Let p(x) and d(x) be polynomials, and assume that d(x) is not the zero
polynomial. Then there
are unique polynomials q(x) and R(x) such that p(x) = d(x) · q(x) + R(x), where
the degree of
R is less than the degree of d. R(x) is called the remainder.
Remainder Theorem
When a polynomial f(x) is divided by x − r, the remainder is f(r).
Factor Theorem
Let f(x) be a polynomial. If f(r) = 0, then x − r is a factor of f(x).
Conversely, if x − r is a
factor of f(x), then f(r) = 0.
Linear Factors Theorem
Any polynomial f(x) of degree n can be be expressed as a product of n linear
factors, f(x) =
 , where each
, where each
 is a root of f (x), and may be
a real or complex number.
is a root of f (x), and may be
a real or complex number.
Some roots may be repeated.
Rational Roots Theorem
If  , and all the coefficients are integers.
Then any root of the
, and all the coefficients are integers.
Then any root of the
equation f(x) = 0 must be of the form  , where
p is a factor of
, where
p is a factor of  (the constant term of f ) and
(the constant term of f ) and
q is a factor of  (the leading coefficient of
f), and p and q have no common factors (so
is in
(the leading coefficient of
f), and p and q have no common factors (so
is in
lowest terms).
Complex Conjugate Roots Theorem
Let f(x) be a polynomial whose coefficients are real numbers. If a + bi is a
root of f(x) = 0,
and b ≠ 0, then a − bi is also a root of f(x) = 0).
Linear and Quadratic Factors Theorem
Any polynomial with real roots can be factored into linear and quadratic factors
with real coefficients.
Partial Fractions Decompositions
In the following, we always assume the degree of p(x) is smaller than the degree
on the bottom:
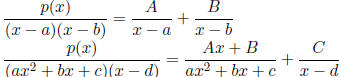 ,where ax2 +
bx + c is irreducible
,where ax2 +
bx + c is irreducible

 ,where ax2 +
bx + c
,where ax2 +
bx + c
is irreducible